



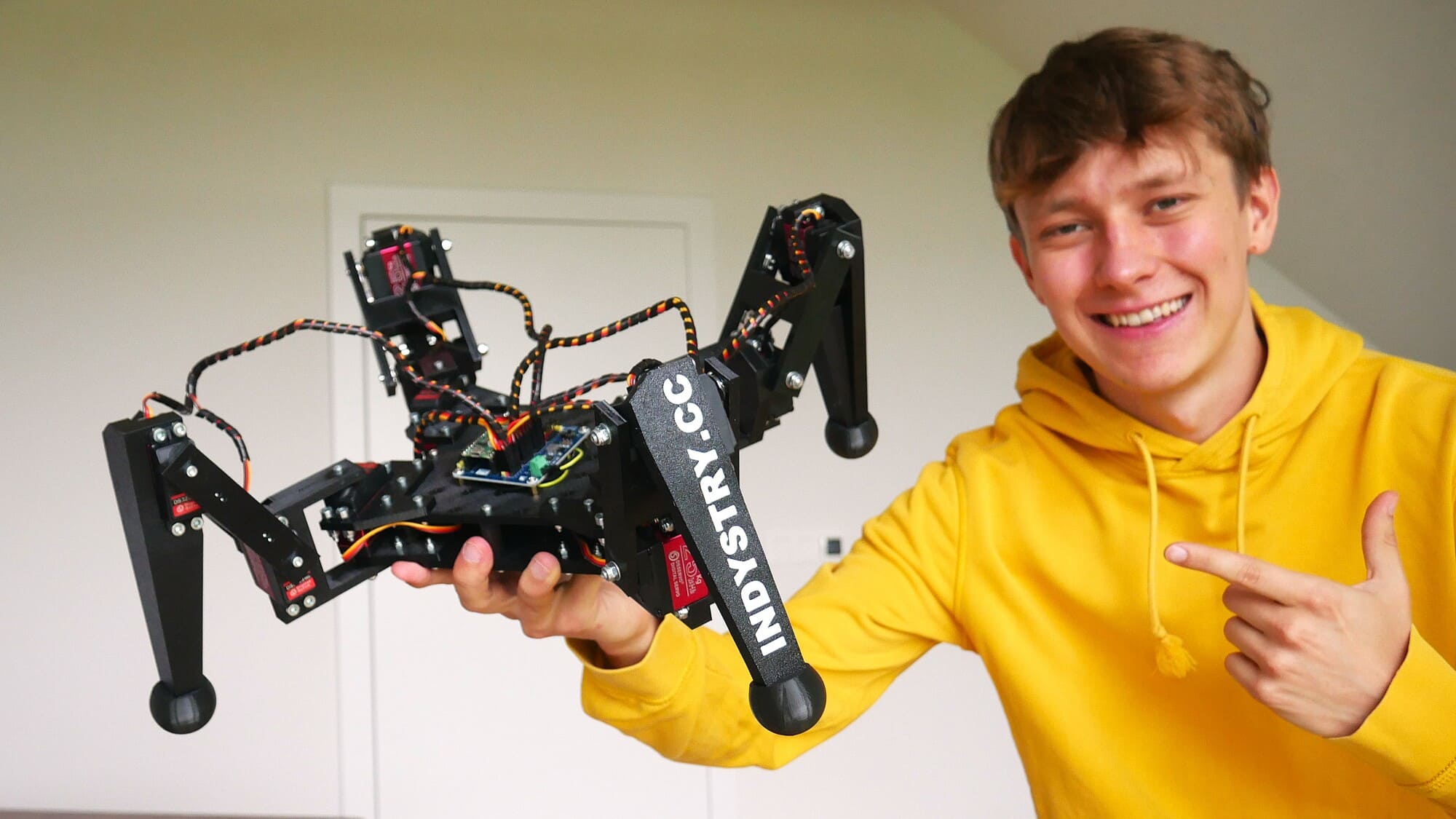
🕷️ SPDR Bot: 3D Printable 4-Legged Robot
A professional-grade walking platform designed for reinforcement learning, simulation, and advanced makers.
⚡
Instant Digital Access: Get all STL, 3MF, STEP, and Fusion 360 source files immediately.
Instant Digital Access: Get all STL, 3MF, STEP, and Fusion 360 source files immediately.
🤖 Simulation-First Robotics
Don’t risk your hardware on untested code. SPDR Bot is engineered for a digital-twin workflow. Train your walking algorithms in NVIDIA Isaac Sim using reinforcement learning before ever touching the real robot.
- URDF Ready: Perfectly defined joints for physics engines.
- Reinforcement Learning: Learn to walk, crawl, or recover from falls in simulation.
- OpenRoboticPlatform (ORP): Designed following standard rules for maximum interoperability.
⚙️ High-Performance Hardware
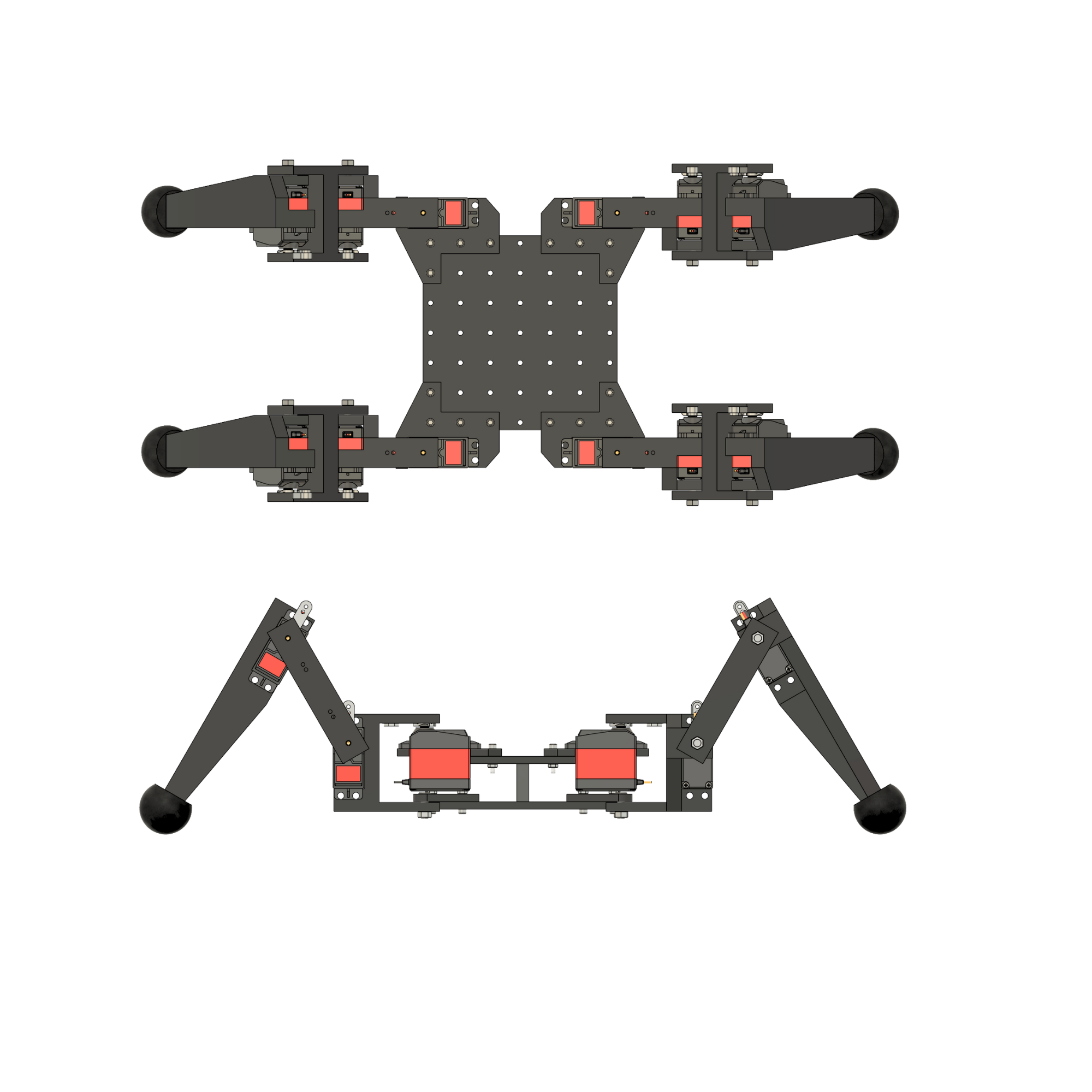
A walking robot requires precision. Every joint has been optimized for high-torque 25kg servos and a sturdy, lightweight FDM-printed frame.
- 12-Servo Locomotion: 3 Degrees of Freedom (DoF) per leg for fluid, lifelike movement.
- Modular Brain Bay: Spacious chassis fits Jetson Nano, Raspberry Pi, or Pico controllers.
- Easy Maintenance: Standard screw assembly with no exotic tools required.
Choose Your Path
The Simulator (Free)
Get the URDF and simulation setup on GitHub to explore controls in Isaac Sim for free.
The Full Build (Standard)
Includes print-ready STL/3MF files, full Fusion 360 source files, and MicroPython control code.
RECOMMENDED
Build Your Robot Legacy
Download the complete design package and start printing today.
✅ Editable Fusion 360 Files
✅ MicroPython Control Code
✅ Print-Ready Profiles
✅ MicroPython Control Code
✅ Print-Ready Profiles





Reviews
There are no reviews yet.